Edmonds-Karp算法复杂度证明
本文给出EK算法复杂度的(严格)证明,证明过程参考了这两篇文章证明1、证明2。这是我为了发布 Dinic算法复杂度证明 而写的前置文章,Dinic复杂度证明用到了EK复杂度证明的一个结论。欢迎大家指正!
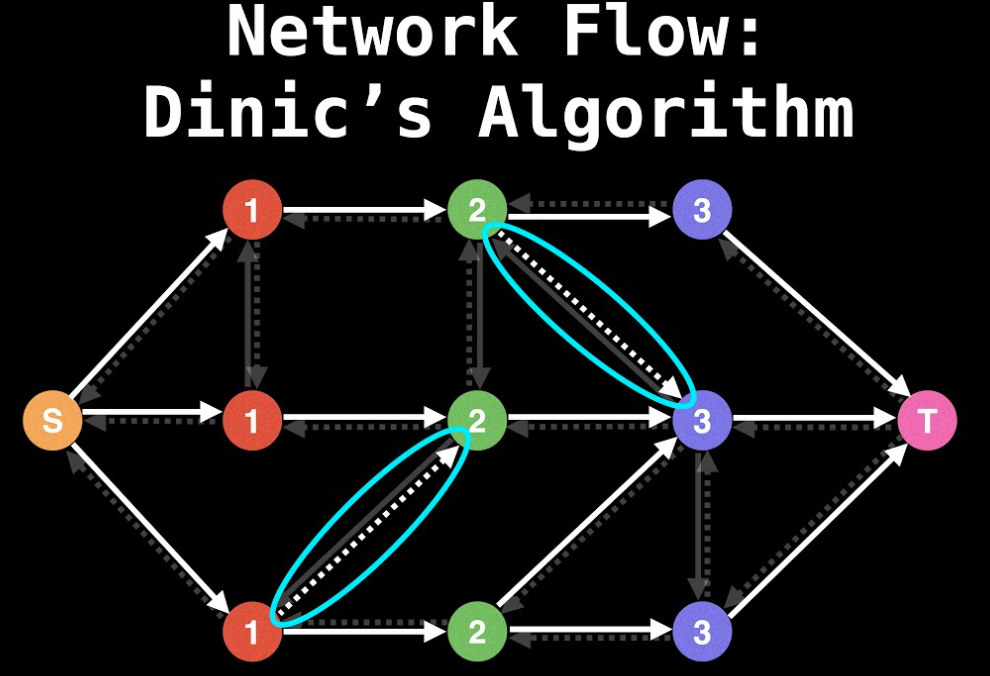
EK算法: 以BFS方式 (无权最短路径) 寻找增广路径实现 Ford-Fulkerson 方法即为 Edmonds-Karp 算法。每找到一条增广路并确定该路径上的最小边权(该路径最大可发送流)后,将此边权计入最大流中,并在此路径上对 s>t 方向的边减去该权值,t>s 方向上加上该权值。当BFS无法再找到增广路时算法结束,得到 s 到 t 的最大流。
时空复杂度
以下证明 EK 算法的时间复杂度为:O(∣V∣∣E∣2)
本证明参考了证明1、证明2。
1. 一次BFS增广
每次 bfs 增广,在增广路上的未饱和边会多出一条反向边,原图的单向边添加反向边后,就具有双向边 (两条) ,但饱和边仍是一条 (反向) ,因此增广操作导致的边数增长不会使总边数超过原来的 2 倍,即算法的任意时刻总边数 <2∣E∣。因此一次 bfs 的时间复杂为 O(2∣E∣),即 O(∣E∣)。
2. BFS增广次数
2.1 增广路长度非递减
即证明算法过程中的 s 到 t 的 BFS 增广操作,即正向边删除和反向边增加的操作,不会导致源点 s 到任意一点 v 的最短路径距离减少。残留图 Gf 经过一次 BFS 增广变为 Gf′ 后,对任意顶点 v ,源点 s 到 v 的最短路径长度 非递减,即有 d′(s,v)≥d(s,v)。以下利用反证法证明,并在证明中解释为何只能证明非递减而无法证明严格递增,即不是 d′(s,v)>d(s,v)。
-
假设某一次 s−t 增广后,使得某些顶点到源点 s 的最短路径距离相比增广前变小了,且这其中距离源点 s 最近者为 v。则根据该假设有
(1) d′(s,v)<d(s,v)
-
令 u 为 Gf′ 中 v 的靠近源点 s 的前一个顶点,则有
(2) d′(s,u)+1=d′(s,v)
如 2.1.1 所述,v 是我们有意选择的在 Gf′ 中最短距离相比在 Gf 中变小的且距离 s 最近的顶点,u 比 v 更靠近 s,但在 Gf′ 中相比在 Gf 中距离 s 的最短路径未变小,即有
(3) d(s,u)≤d′(s,u)
-
假设 (u,v)∈Ef,已知 s 到 v 的最短路径距离为 d(s,v),则有
(4) d(s,u)+1=d(s,v)
结合(1)、(2)、(3)有
d(s,u)≤d′(s,u)→d(s,u)+1≤d′(s,u)+1=d′(s,v)<d(s,v),即
(5) d(s,u)+1<d(s,v)
(4) 是由 2.1.3 的假设得到的,与由 (1), (2), (3) 得到的 (5) 矛盾,故在 2.1.1 假设成立的前提下,2.1.3 的假设 (u,v)∈Ef 不成立,即 (u,v)∈/Ef。同时我们还能看到,如果一开始证明的是 d′(s,v)>d(s,v),那么就要反证 d′(s,v)≤d(s,v) (对应式(1)),经过同样的过程当前的式 (5) 会变为 d(s,u)+1≤d(s,v),将推导不出与 (4) 式的矛盾(因为都有一个等号)。
-
由上述知 (u,v)∈/Ef,但如 2.1.2 所述,(u,v)∈Ef’ ,故在 Gf 上的增广必定经过了 (v,u),且此边饱和,导致在 Gf′ 中产生了反向边 (u,v)。于是可知在 Gf 中有
(6) d(s,u)=d(s,v)+1
(6) 与 (5) 矛盾,于是最初 2.1.1 的假设不成立,即不存在这样的顶点 v,也即增广操作使得源点到任意一点 v 的长度 非递减, 故EK算法寻找的增广路长度非递减。
2.2 增广次数
-
假设某次 Gf 的增广中 (u,v) 为饱和边,增广后 (u,v)∈/Ef′,(v,u)∈Ef′。之后 (u,v) 要再次出现的前提是 (v,u) 在增广路上。在 Gf 中 (u,v) 第一次成为饱和边时有
(7) d(s,v)=d(s,u)+1
-
若 (u,v) 第二次成为饱和边,可知在此前的 Gf′ 中 (v,u) 中在增广路上,在 Gf′ 的这次增广中有
(8) d′(s,u)=d′(s,v)+1
-
由 2.1 的结论,s 到任意顶点的最短路径非递减,即必有 d′(s,v)≥d(s,v) ,结合 (7) 和 (8),有
d′(s,u)=d′(s,v)+1≥d(s,v)+1=d(s,u)+2,即
(9) d′(s,u)≥d(s,u)+2
也就是说,(u,v) 第二次成为饱和边时 s 到 u 的最短距离至少比前一次成为饱和边时大 2。而 s 到任意顶点的距离最多不超过∣V∣−1,故 (u,v) 可以成为饱和边的次数最多为 (∣V∣−1)/2。每次增广至少有一条边成为饱和边,根据 2.1 中的说明,EK算法过程中边数 <2∣E∣,故考虑 所有边的总的增广次数必小于 2∣E∣∗(∣V∣−1)/2,即 增广次数复杂度为 O(∣V∣∣E∣)。
综上,EK 算法复杂度为 O(∣V∣∣E∣2)。
证明过程中 BFS增广使得增广路长度非递减 的结论是关键,网上有的文章声称 BFS 寻找增广路的操作使得增广路长度递增,但我们已经在 2.1.3 的叙述中指出这是不对的。根据 2.1 的证明,只能得到 非递减 的结果,但这一结论在 2.2 中足以证明任意边第二次成为饱和边时其最短路径长至少增加2,由此得到BFS次数的上界。
空间复杂度:存图空间为 O(∣V∣+∣E∣) ,队列空间为 O(∣V∣) 。总体时间复杂度为 O(∣V∣+∣E∣) 。